
Capteur de proximité IR simple.
Bonjour ! Dans ce tutoriel je vais vous apprendre comment faire un capteur de proximité très simple en utilisant l'infrarouge LED et Arduino.
Après avoir essayé plusieurs fois, je suis finalement arrivé à quelque chose d'assez simple et de précis. Tout comme mon premier tutoriel, ce projet est parfait pour les débutants dans le monde de l'Arduino, avec quelques composants tout le monde peut le faire. J'espère que vous apprécierez.
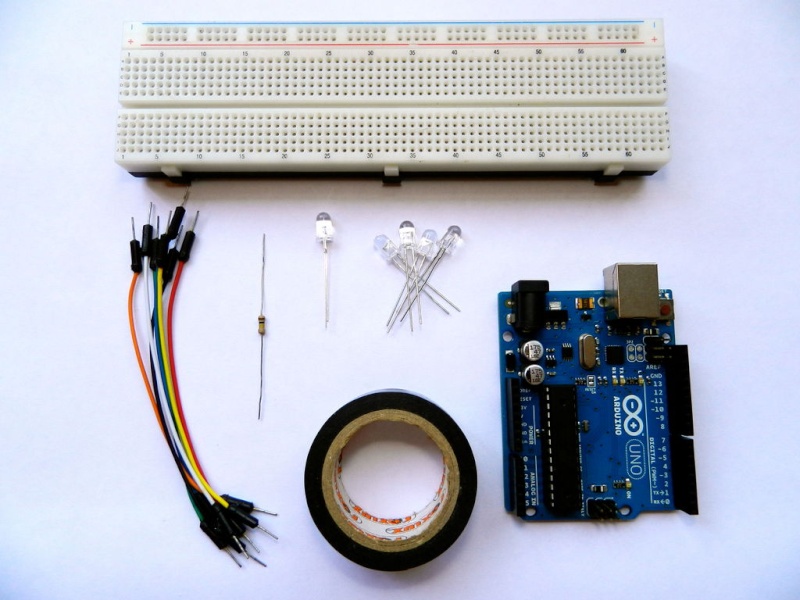
Pour ce montage tu vas avoir besoin:
- Arduino
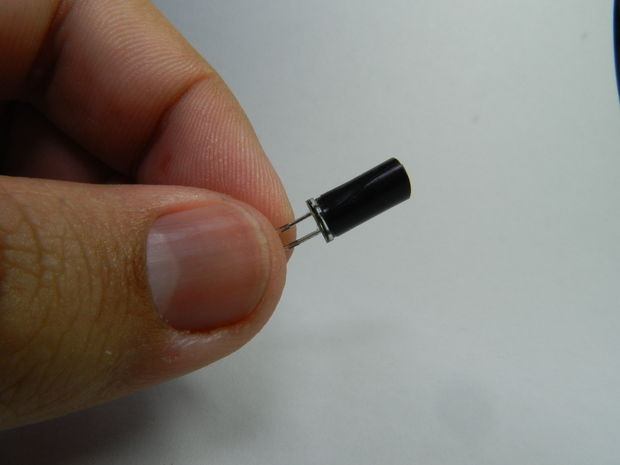
- 1 récepteur IR LED (photodiode à 2 picots, pas le phototransistor avec 3 broches)
- LED IR émetteurs (autant que vous pouvez obtenir, mais au moins 2)
- 100K résistance (brun noir jaune)
- Des fils pour cavalier
- Planche à essais
- Ruban adhésif électrique
- Buzzer (facultatif)
Attention à ne pas confondre le récepteur LED avec l'émetteur LED, ils se ressemblent tous.
Préparation du capteur IR
Avant tout, nous devons préparer le récepteur IR LED pour ne pas recevoir la lumière sur les côtés, de sorte que le capteur soit plus directionnel.
J'utilise du ruban adhésif électrique pour le faire, mais vous pouvez utiliser une paille ou quelque chose qui bloque la lumière sur les côtés.
Coupez un petit morceau de ruban adhésif électrique et l'enrouler autour du récepteur IR LED, formant un tube. Coupez le bord avec une paire de ciseaux jusqu'à ce qu'il soit environ 1cm de long.
Jetez un oeil sur la photo ci dessous pour voir comment je l'ai fait avec du ruban électrique.
Le code
Code : Tout sélectionner
/ / Capteur de proximité simple par infrarouge
/ / Description: Mesurez la distance d'un obstacle en utilisant la lumière infrarouge émise par la LED IR et
/ / Lire la valeur avec une photodiode IR. La précision n'est pas parfait, mais fonctionne très bien
/ / Avec de petits projets.
/ / Auteur: Ricardo Ouvina
/ / Date: 01/10/2012
/ / Version: 1.0
int Irpin = A0; photodiode / / IR sur la broche analogique A0
int IRemitter = 2; / / émetteur IR LED sur la broche numérique 2
int ambientIR; / / variable pour stocker l'IR en provenance de la température ambiante
int obstacleIR; / / variable pour stocker l'infrarouge provenant de l'objet
int valeur [10]; / / variable pour stocker les valeurs IR
la distance int; / / variable qui nous dira s'il ya ou non un obstacle
void setup () {
Serial.begin (9600); / / initialisation de moniteur de série
pinMode (IRemitter, OUTPUT); / / émetteur IR LED sur la broche numérique 2
digitalWrite (IRemitter, LOW) ;/ / setup LED IR comme off
pinMode (11, OUTPUT); / / buzzer en broche numérique 11
}
void loop () {
distance = readIR (5); / / appel de la fonction qui va lire la distance et le passage de la «précision» qui lui
Serial.println (distance); / / écriture de la valeur lue sur le moniteur de série
/ / Buzzer (); / / Décommentez pour activer la fonction vibreur
}
int readIR (int fois) {
for (int x = 0; <x fois, x + +) {
digitalWrite (IRemitter, LOW); / / tourner la LED IR off de lire le IR provenant de l'air ambiant
retard (1); / / retard minimum nécessaire pour lire les valeurs
ambientIR = analogRead (Irpin); / / stockage IR provenant de l'air ambiant
digitalWrite (IRemitter, HIGH); / / tourner la LED IR à lire le IR en provenance de l'obstacle
retard (1); / / retard minimum nécessaire pour lire les valeurs
obstacleIR = analogRead (Irpin); / / stockage IR en provenance de l'obstacle
valeur [x] = ambientIR-obstacleIR; / / calcul des changements dans les valeurs IR et de la stocker pour l'avenir moyenne
}
for (int x = 0; x <fois; x + +) {/ / calcul de la moyenne basée sur la "précision"
Distance + = valeur [x];
}
retour (distance / temps); / / Retourne la valeur finale
}
/ / - Fonction pour faire retentir un signal sonore pour les mesures acoustiques - / /
buzzer void () {
si (distance> 1) {
si (distance> 100) {/ / acoustique continu si l'obstacle est trop proche
digitalWrite (11, HIGH);
}
else {/ / bips plus vite quand un obstacle se rapproche
digitalWrite (11, HIGH);
retard (150 minutes); / / ajuster cette valeur pour votre commodité
digitalWrite (11, LOW);
retard (150 minutes); / / ajuster cette valeur pour votre commodité
}
}
else {/ / hors tension si il n'existe aucun obstacle
digitalWrite (11, LOW);
}
}
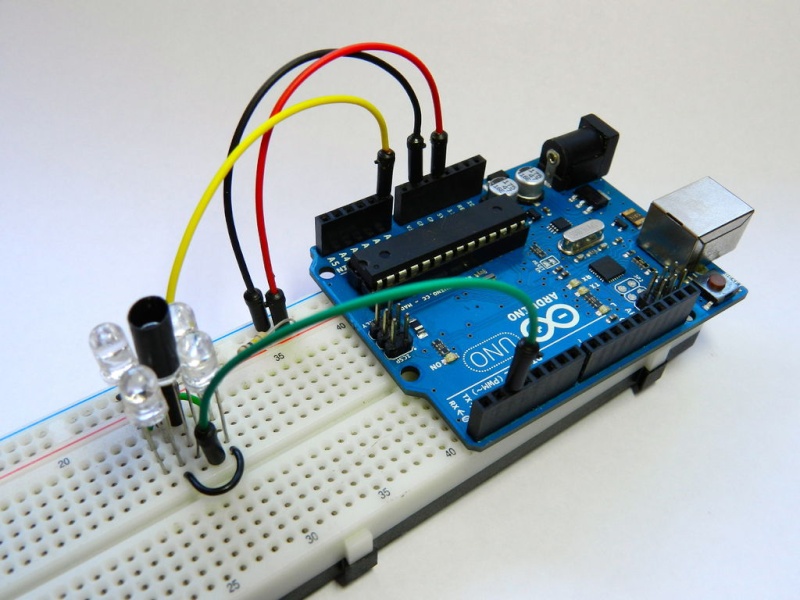
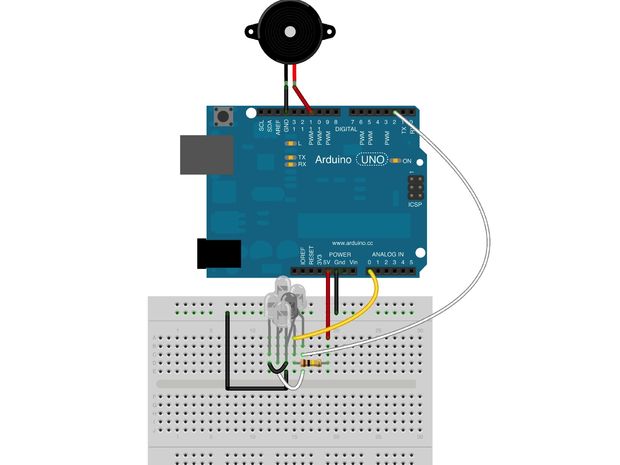
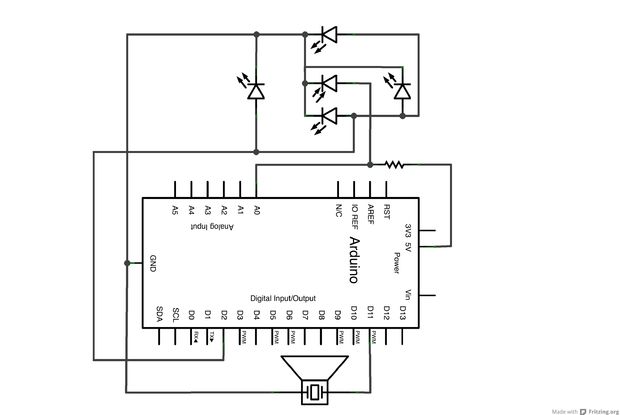
Câblage :
Connecter la résistance a la broche 5V et à la broche d'anode du récepteur IR LED. Tous les anodes broches de la LED émetteurs IR à la borne numérique 2. Un fil va de la broche analogique 0 à la broche d'anode de récepteur IR LED. N'oubliez pas de connecter toutes les broches cathode des diodes à la borne de masse.
Le buzzer est facultatif, mais si vous l'utilisez, connecter le à la broche numérique 11 et la masse.
La lumière infrarouge n'est pas visible à l'oeil nu, mais vous pouvez le voir à travers un appareil photo numérique, il est utile de voir si la LED fonctionne ou pas.
Jetez un coup d'oeil aux photos.
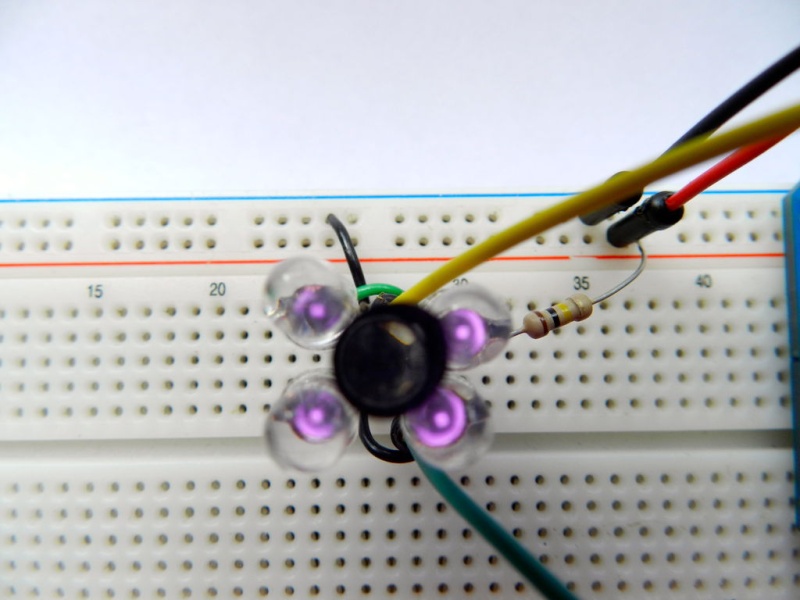
Le capteur répond à 10 pouces (25 cm) ou plus près, il est donc bon pour les petites distances.
Voici une vidéo que j'ai faite.
La page web original