
Hervé.
Maintenant, c'est là que les choses se Corse (Oui, il parait qu'ils ont un fromage explosif là bas

).
Le programme (récupéré sur le net car j'ai pas envie de tout écrire

), sur lequel j'ai ajouter quelques définitions permet de contrôler 2 moteurs DC
Code : Tout sélectionner
//Constants
#define nbL298N 2
//Parameters
const int enaL298NPin[2] = {10, 5}; // Borne d'activation de l'alimentation du moteur ENA & ENB
const int fwdL298NPin[2] = {8, 9}; // Enroulement moteur A
const int bwdL298NPin[2] = {6, 7}; // Enroulement moteur B
//Variables
int Power = 200;
void setup()
{
//Init Serial USB
Serial.begin(9600); // initialisation du port USB a 9600 bauds par seconde
Serial.println(F("Initialize System")); // Affichage sur l'écran du PC de ce qui est entre les " "
//Init DCmotor
for (int i = 0; i < nbL298N; i++)
{
pinMode(fwdL298NPin[i], OUTPUT); // initialisation en SORTIE des bornes 8 & 9
pinMode(bwdL298NPin[i], OUTPUT); // initialisation en SORTIE des bornes 6 & 7
pinMode(enaL298NPin[i], OUTPUT); // initialisation en SORTIE des bornes 5 & 10
}
}
void loop()
{
testL298N();
}
void testL298N() { /* function testL298N */
////Scenario to test H-Bridge
for (int i = 0; i < nbL298N; i++)
{
digitalWrite(enaL298NPin[i], HIGH); // mise a 1 (soit 5V) les bornes ENA & ENB
analogWrite(bwdL298NPin[i], 0); // Le moteur B ne fonctionne pas
for (int j = 0; j <= Power; j = j + 10)
{
analogWrite(fwdL298NPin[i], j); // Le moteur A tourne dans un sens
delay(20);
}
for (int j = Power; j >= 0; j = j - 10)
{
analogWrite(fwdL298NPin[i], j); // le moteur A tourne dans l'autre sens
delay(20);
}
delay(2000);
}
}
Autre exemple de code bien plus détaillé, et a mon sens, beaucoup plus simple a comprendre pour un néophyte.
Ce petit programme est prévu pour un petit robot où chaque moteur fait tourner une roue.
Il peut donc avancer ou reculer (les deux moteurs fonctionne en même temps et dans le même sens), tourner dans un sens ou dans l'autre (dans ce cas les moteurs fonctionnent en même temps mais ne tournent pas dans le même sens).
Petit robot de ce genre là :
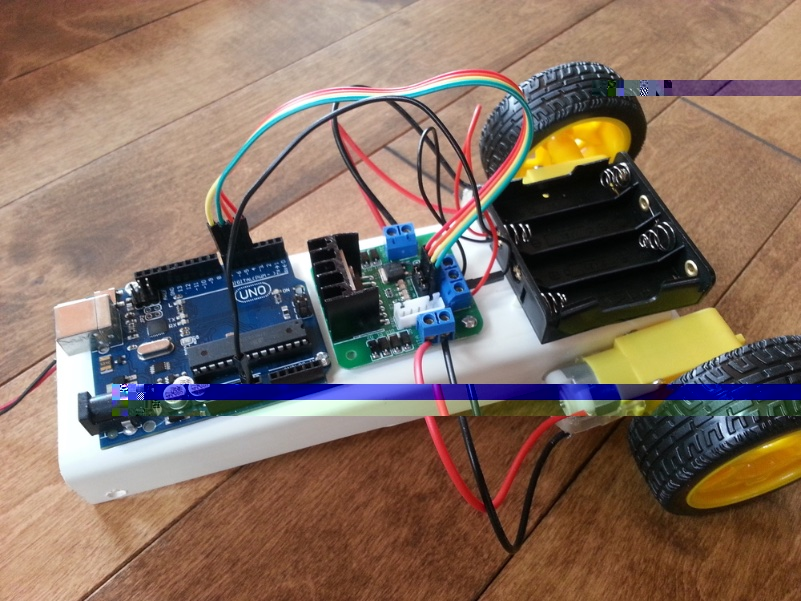
- robot.jpg (188.63 Kio) Vu 1226 fois
.
Code : Tout sélectionner
// Moteur 1
int ENA = 10;
int IN1 = 9;
int IN2 = 8;
// Motor 2
int ENB = 5;
int IN3 = 7;
int IN4 = 6;
void setup (){
// on déclare les pins comme sorties
pinMode (ENA, OUTPUT);
pinMode (ENB, OUTPUT);
pinMode (IN1, OUTPUT);
pinMode (IN2, OUTPUT);
pinMode (IN3, OUTPUT);
pinMode (IN4, OUTPUT);
}
void Avancer (){ // fonction avancer
//sens moteur A
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
analogWrite (ENA, 100); //Vitesse moteur A
//sens moteur B
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
analogWrite (ENB, 100); //Vitesse moteur B
}
void Reculer (){ // fonction reculer
//sens moteur A
digitalWrite (IN1, LOW);
digitalWrite (IN2, HIGH);
analogWrite (ENA, 128); //Vitesse moteur A
//sens moteur B
digitalWrite (IN3, LOW);
digitalWrite (IN4, HIGH);
analogWrite (ENB, 128); //Vitesse moteur B
}
void Droite (){ // fonction pour tourner a droite
//sens moteur A
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
analogWrite (ENA, 200); //Vitesse moteur A
//sens moteur B
digitalWrite (IN3, LOW);
digitalWrite (IN4, HIGH);
analogWrite (ENB, 100); //Vitesse moteur B
}
void Gauche (){ // fonction pout tourner a gauche
//Sens moteur A
digitalWrite (IN1, LOW);
digitalWrite (IN2, HIGH);
analogWrite (ENA, 50); //Vitesse moteur A
//sens moteur B
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
analogWrite (ENB, 150); //Vitesse motor B
}
void Arreter (){ // fonction s'arrêter
//Sens moteur A
digitalWrite (IN1, LOW);
digitalWrite (IN2, LOW);
analogWrite (ENA, 0); //Vitesse moteur A
//Sens moteur B
digitalWrite (IN3, LOW);
digitalWrite (IN4, LOW);
analogWrite (ENB, 0); //Vitesse moteur B
}
void loop (){ // boucle principal du programme où on fait appel aux fonctions ci-dessus pour les exécuter.
Avancer (); // ont avance
delay (5000); // pendant 5 secondes
Reculer (); // ont recule
delay (2000); // pendant 2 secondes
Droite (); // ont vas a droite
delay (2000); pendant 2 secondes
Gauche (); // ont vas a gauche
delay (2000); pendant 2 secondes
Arreter (); // ont s'arrête
delay (4000); pendant 4 secondes
// Retour au début de la boucle principal du programme (le programme tourne donc en boucle indéfiniment).
}

